Студентський гурток «SmartThings»
Керівник гуртка - асистент кафедри ІТТС Могилін Віталій Богданович, е-mail: vitalii.mohylin@nung.edu.ua
Наказ про створення гуртка (завантажити)
Положення про гурток (завантажити)
Для того, щоб стати членом гуртка необхідно заповнити - форму
Календарний план роботи гуртка на 2026 н.р. (завантажити)
Протоколи засідань гуртка 2026 р. (завантажити)
Звіт про роботу гуртка за 2026 н.р. (завантажити)
Витяг з протоколу засідання кафедри про затвердження плану роботи гуртка на 2025/26 н.р. (завантажити)
Список членів гуртка станом на 01.06.2026 р. (завантажити)
Календарний план роботи гуртка на 2025 н.р. (завантажити)
Протоколи засідань гуртка 2025 р. (завантажити)
Звіт про роботу гуртка за 2025 н.р. (завантажити)
Список членів гуртка станом на 01.06.2025 р. (завантажити)
Календарний план роботи гуртка на 2024 н.р. (завантажити)
Протоколи засідань гуртка 2024 р. (завантажити)
Звіт про роботу гуртка за 2024 н.р. (завантажити)
Список членів гуртка станом на 01.06.2024 р. (завантажити)
Календарний план роботи гуртка на 2023 н.р. (завантажити)
Звіт про роботу гуртка за 2023 н.р. (завантажити)
Список членів гуртка станом на 30.05.2023 р. (завантажити)
SmartThings - гурток для студентів, що навчаються на спеціальностях F6 - Інформаційні системи та технології, G7 - Автоматизація, комп'ютерно-інтегровані технології та робототехніка (освітні програми Програмне забезпечення кіберфізичних та робототехнічних систем та Системна інженерія - Інтернет речей). Мета функціонування гуртка - розвиток навичок проектування систем та програмування у студентів та поглиблення практичних навичок, отриманих в процесі лабораторних занять.
Напрямки функціонування гуртка:
Системна інженерія;
Робототехніка;
Інтернет речей;
Промислові системи управління;
Штучні нейронні мережі;
Розпізнавання образів.
Результати 2025–2026 навчального року
Протягом навчального року гурток провів 10 засідань. Студенти успішно реалізували інженерні проєкти з мікроконтролерної техніки та взяли активну участь у наукових конференціях.
Досягнення на конференціях
Члени гуртка «SmartThings» взяли активну участь у XXXVIII науково-технічній конференції студентів ІФНТУНГ, де продемонстрували високий рівень підготовки та здобули призові місця. Це підтверджує практичну цінність інженерних розробок, виконаних у рамках діяльності гуртка.
- 🥇 Андрій Козарук — 1 місце
- 🥇 Станіслав Сабецький — 1 місце
- 🥈 Олександр Андрейчук — 2 місце
- 🥈 Вікторія Гуріненко — 2 місце

Реалізовані проєкти
У 2025–2026 навчальному році учасники гуртка самостійно розробили та зібрали шість діючих інженерних стендів на базі мікроконтролерної техніки. Кожен проєкт пройшов повний цикл від постановки задачі та підбору елементної бази до апаратної реалізації, програмування та тестування.
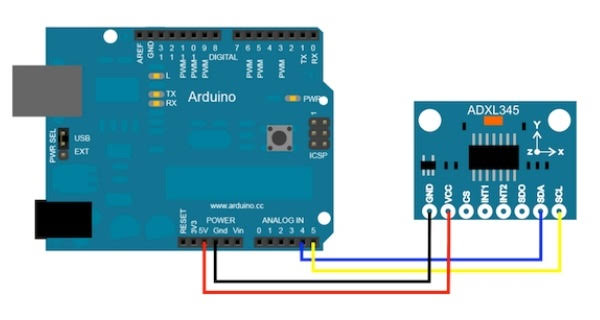
1. Дослідження інерціального сенсора (акселерометр та гіроскоп)
Розроблено систему зчитування просторового положення об'єкта на базі мікроконтролера та модуля MPU6050, який містить 3-осьовий акселерометр і 3-осьовий гіроскоп. Реалізовано фільтрацію «сирих» даних за допомогою фільтра Калмана та математичне перетворення у кути нахилу (Pitch, Roll, Yaw) з виведенням у реальному часі.
Виконавці: Зікратий О.А., Субичев Ю.О.

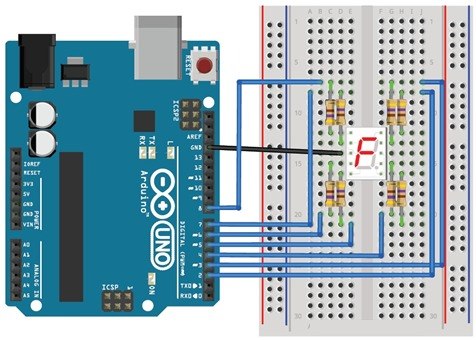
2. Дослідження роботи чотирирозрядного семисегментного індикатора
Створено пристрій візуального виводу числових даних на базі мікроконтролера з підключеним семисегментним дисплеєм. Реалізовано алгоритм динамічної індикації, що дозволяє послідовно запалювати розряди з високою частотою, створюючи ілюзію одночасного світіння. Додатково реалізовано функціонал секундоміра та лічильника натискань.
Виконавці: Шевчук Г.П., Лабай Д.Т.

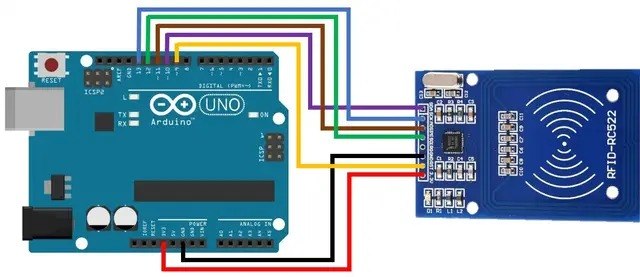
3. Дослідження радіоідентифікації (RFID)
Розроблено систему безконтактної ідентифікації на базі RFID-зчитувача та мікроконтролера з підтримкою карток стандарту MIFARE. Мікропрограма зчитує унікальний ідентифікатор (UID) піднесеної мітки та порівнює його з масивом еталонних значень, реалізуючи базову логіку контролю доступу «свій/чужий».
Виконавці: Рощук В.О., Шпирка В.І.

4. Дослідження роботи тензодавача
Зібрано діючий прототип електронних ваг на базі тензодавача (Load Cell) та високоточного АЦП модуля HX711. Виконано програмне калібрування системи: визначення нульової точки та обчислення калібрувального коефіцієнта за допомогою ваги-еталона. Результат виводиться у грамах та кілограмах.
Виконавець: Шістка А.І.

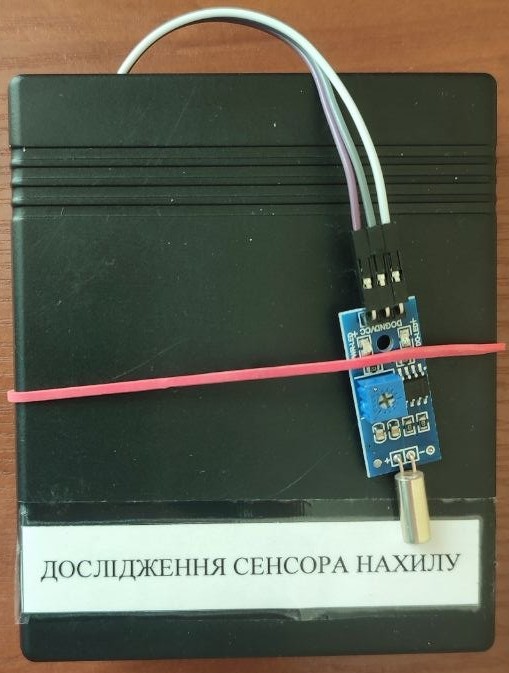
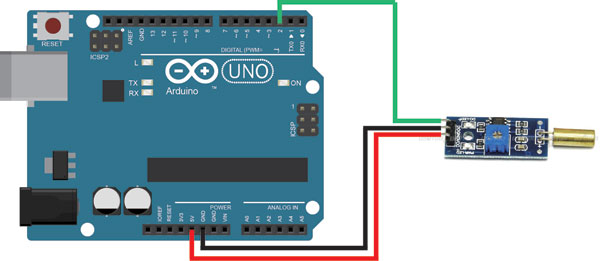
5. Дослідження сенсора нахилу
Розроблено систему апаратного реагування на зміну фізичного положення об'єкта з використанням електромеханічного датчика нахилу SW-520D. Реалізовано програмне усунення брязкоту контактів (debounce) та логіку активації виконавчого пристрою (світлодіод або зумер) при досягненні критичного кута нахилу.
Виконавець: Мельник Д.П.
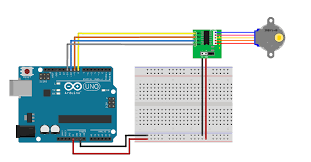
6. Керування чотирифазним кроковим двигуном
Створено керований електропривод на базі чотирифазного крокового двигуна та плати-драйвера ULN2003. Розроблено програмне забезпечення для формування правильної часової послідовності імпульсів обмоток статора. Досліджено повнокроковий та напівкроковий режими комутації, реалізовано керування напрямком обертання та швидкістю.
Виконавці: Скрипник С.С., Купчак М.М.

Публікації
За результатами досліджень члени гуртка підготували та опублікували наукові тези у збірниках всеукраїнських та міжнародних конференцій:
- Сабецький С.І. Порівняння методів дистанційного керування кіберфізичними системами — Всеукраїнська конференція, Дніпро, 2025
- Белей О.І. та ін. Розроблення системи контролю метеорологічних показників на птахофермі — «Наука і техніка сьогодні», № 11, 2025
- Кицманюк Р.М. та ін. Автоматизований процес виготовлення пластикових пляшок — Міжнар. конф., Умань, 2026
- Левицький І.Т., Макота Л.В. Інверторний силовий блок для катодного захисту — Міжнар. конф., Ванкувер, 2026